Relații metrice în triunghiul dreptunghic Rezolvarea triunghiului dreptunghic
Selecție de lecții videoRelații metrice în triunghiul dreptunghic
Rezolvarea triunghiului dreptunghic
Elementele unui triunghi dreptunghic sunt: ipotenuza, cele două catete, unghiul drept și cele două unghiuri ascuțite.
De exemplu, dacă se cunosc două laturi, se poate afl a a treia latură folosind teorema lui Pitagora. Apoi se pot afla și măsuri de unghiuri cu ajutorul relațiilor trigonometrice.
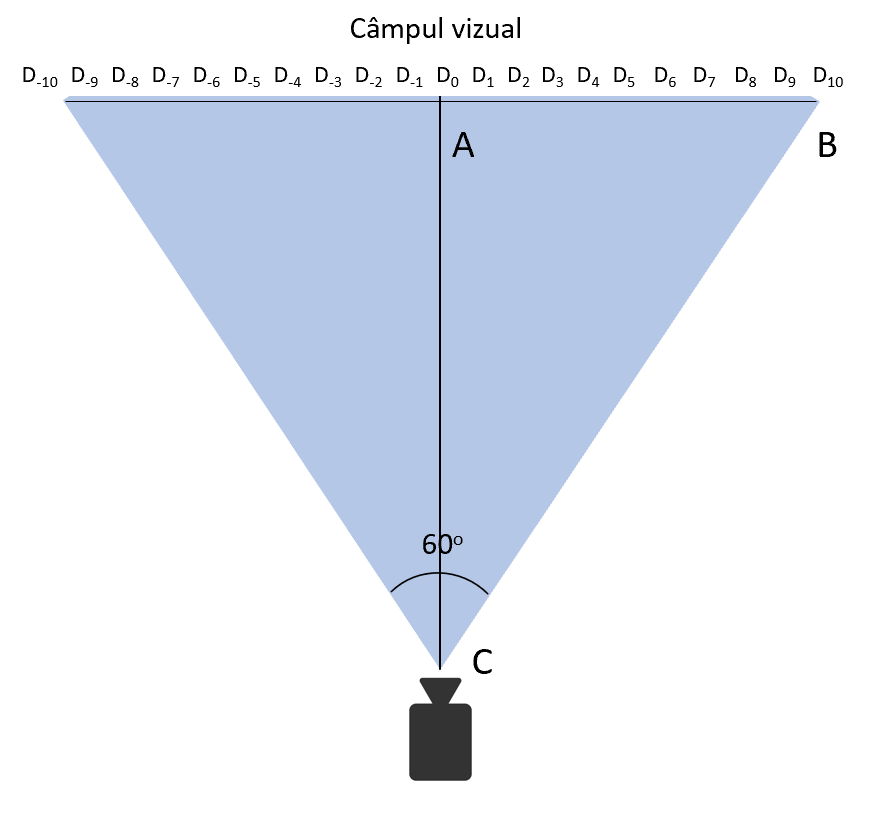
1. Un robot se deplasează în linie dreaptă într-un depozit. El vede prin camera situată în fața lui dacă sunt obstacole în calea sa și astfel poate evita o coliziune. Imaginile de la cameră sunt procesate de un algoritm informatic. La ieșirea acestui algoritm avem un șir de 21 de numere care reprezintă distanțe în mm numerotate astfel :
D -10 ; D -9 ; D -8 ; D -7 ; D -6 ; D -5 ; D -4 ; D -3 ; D -2 ; D -1 ; D 0 ; D 1 ; D 2 ; D 3 ; D 4 ; D 5 ; D 6 ; D 7 ; D 8 ; D 9 ; D 10 ;
Unde D n reprezint ă distanța în mm de la robot la obiectul care se află în câmpul vizual al robotului pe poziția reprezentată de indice. Indicii negativi reprezintă partea stângă, indicii pozitivi obiectele situate în partea dreaptă iar D 0 reprezintă distanța măsurată drept înainte.
Cu cât indicii sunt mai îndepărtați de centru (D 0 ), cu atât ei reprezintă obiecte situate mai la periferia câmpului vizual. D -10 și D 10 reprezintă distanțe până la obiecte situate în extrema stângă respectiv în extrema dreaptă a câmpului vizual. Dincolo de aceste poziții robotul nu mai detecteaz ă, nu mai vede. -1 reprezintă faptul că nu este detectat niciun obiect în câmpul vizual la poziția respectivă.
De exemplu șirul
0; 0; 0; 0; 0; 0; 0; 0; 0; 0; 1000 ; 0; 0; 0; 0; 0; 0; 0; 0; 0; 0;
reprezintă faptul că este detectat un obiect în centrul câmpului vizual la o distanță de 1m drept în fața de robotului.
Se dau următoarele șiruri:
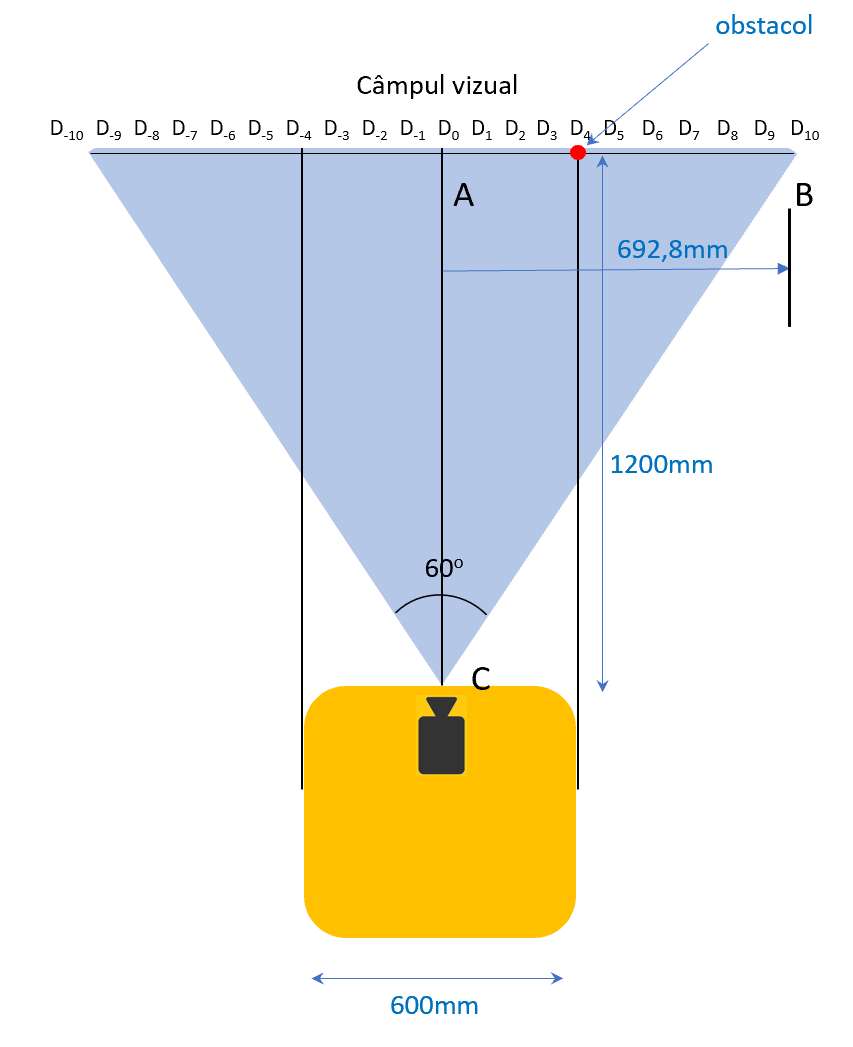
a) 0; 0; 0; 0; 0; 0; 0; 0; 0; 0; 0 ; 0; 0; 0; 1200; 0; 0; 0; 0; 0; 0;
b) 0; 0; 0; 0; 0; 0; 0; 0; 0; 0; 0 ; 0; 0; 0; 1800; 0; 0; 0; 0; 0; 0;
Determina ți în fiecare caz separat, dacă obiectele detectate permit robotului să își continue călătoria nestingherit sau, dacă robotul trebuie să se oprească pentru a evita coliziunea cu ele. Știm că pentru a trece, robotul are nevoie de o cale navigabilă liberă cu lățimea de cel puțin 60cm.
Pentru a simplifica problema considerăm obstacolele punctiforme adică fără grosime iar câmpul vizual drept deși el în realitate este un arc de cerc.


Calculăm dimensiunea reală a câmpului vizual aflat la o distanță de 1200 mm față de robot.
∢
ACB = 30
o
.
tg 30
o
=
\(\frac{AB}{AC}\)
.
AC = 1200
.
\(\frac{\sqrt{3}}{3}\) = \(\frac{AB}{1200}\)
.
AB = \(\frac{1200 · \sqrt{3}}{3}\) = 400 \(\sqrt{3}\)
≃
692,8 care
reprezintă jumătate din câmpul vizual la distanța de 1200mm.
.
Dacă jumătate din câmpul vizual este 692,8mm iar reprezentarea pe care o avem pentru această jumăte de câmp este de 10 puncte atunci câte puncte reprezintă jumătate din lățimea necesară ca robotul să treacă?
Robotul are nevoie de 60cm = 600 mm. Jumătate din 600mm este 300mm.
692,8 ......... 10
300 ........ x
x =
\(\frac{300·10}{692,8}\)
≃
4,3
Pentru că obstacolul se află în poziția 4 și 4 < 4,3 înseamnă că obstacolul este în afara căii de rulare a robotului. În cazul a) robotul poate trece pe lângă obstacolul detectat.
Rezolvând punctul b) veți observa că x
≃
3,4. Pentru că 3,4 < 4 tragem concluzia că robotul
va intra în coliziune cu obstacolul semnalat de cameră la poziția 4 și 1800mm distanță. Ca urmare trebuie să dăm o comandă automată de oprire sau ocolire a obstacolului.
2. Să se afle toate unghiurile, toate laturile, lungimea înălțimii și a segmentelor determinate de ea pe ipotenuză în triunghiul dreptunghic ABC. Se cunosc lungimile catetelor AB = 6 cm și AC = 8 cm. Considerăm că sin(0,8) ≃ 53 o
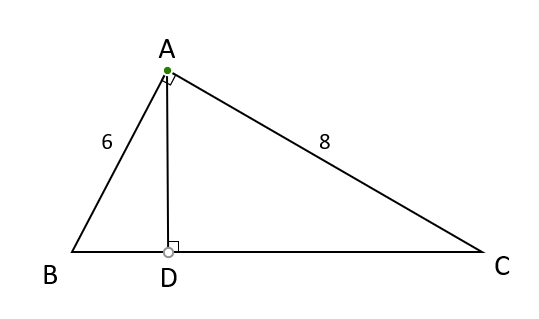
Aplicăm teorema lui Pitagora pentru a afla lungimea ipotenuzei.
BC
2
= AB
2
+ AC
2
⇒
BC
2
= 36 + 64 = 100
⇒
BC =
= 10 cm
Din teorema catetei
⇒
AC
2
= BC · CD
⇒
64 = 10 · CD
⇒
CD = 6,4 cm
⇒
BD = 10 – 6,4 = 3,6 cm.
CD = BC – BD = 10 – 3,6 = 6,4 cm
Din teorema înălțimii
⇒
AD2 = BD · CD
⇒
AD2 = 3,6 · 6,4
AD = \(\sqrt{3,6 · 6,4}\) = \(\sqrt{\frac{36}{10} · \frac{64}{10}}\) = \(\sqrt{\frac{36·64}{100}}\) = \(\frac{\sqrt{36·64}}{\sqrt{100}}\) = \(\frac{48}{10}\) = 4,8 cm
sin(
∢
B) = \(\frac{AC}{BC}\) = \(\frac{8}{10}\) = \(\frac{4}{5}\) => măsura unghiului ABC este aprox. 53
°
⇒
măsura unghiului BCA
≃
90
°
– 53
°
≃
37
°
